|
Mateusz Jaszczuk I am a Master's student in Mechanical Engineering (Robotics) at the GRASP Lab, University of Pennsylvania, advised by Prof. Nadia Figueroa. My research focuses on data-driven methods for adaptive and reactive robotic manipulation — enabling robots to infer task-relevant structure and adjust their control strategies in real time, toward safe and efficient deployment in complex, unstructured environments. Prior to Penn, I received my B.S. in Aeronautical and Astronautical Engineering from Purdue University, where I worked on Bayesian transfer learning for composite manufacturing and led autonomous UAV development at the Air Force Research Lab. |

|
News |
| Sep 2025 | Presented Rapid Mismatch Estimation at CoRL 2025 in Seoul! |
| Aug 2025 | Our paper Rapid Mismatch Estimation was accepted to the 9th Conference on Robot Learning (CoRL)! |
| Jan 2025 | Joined Figueroa Robotics Lab (GRASP), advised by Prof. Nadia Figueroa. |
| Aug 2024 | Started my Master’s degree in Mechanical Engineering at the University of Pennsylvania. |
Research Projects |
|
Learning to Feel: Force-Aware Data-Driven Estimation and Control for Adaptive Physical Interactions
Mateusz Jaszczuk Advisor: Dr. Nadia Figueroa Committee: Dr. Rachel Holladay, Dr. Paris Perdikaris Master's Thesis in Mechanical Engineering and Applied Mechanics, University of Pennsylvania Thesis / Code (coming soon) We propose an adaptive impedance control framework combining online system identification with an interaction classifier, enabling robots to compensate for unknown end-effector loads while remaining passive to human perturbations and leveraging estimated contact forces as guidance for motion planning. |
|
|
Rapid Mismatch Estimation via Neural Network Informed Variational Inference
Mateusz Jaszczuk, Nadia Figueroa 9th Conference on Robot Learning (CoRL), 2025 Paper / Project Website / Code We propose an online, probabilistic framework for estimating the mismatch in the end-effector dynamics model, allowing impedance-controlled robots to manipulate heavy, unknown objects, showcasing fast and safe adaptation. |
|
|
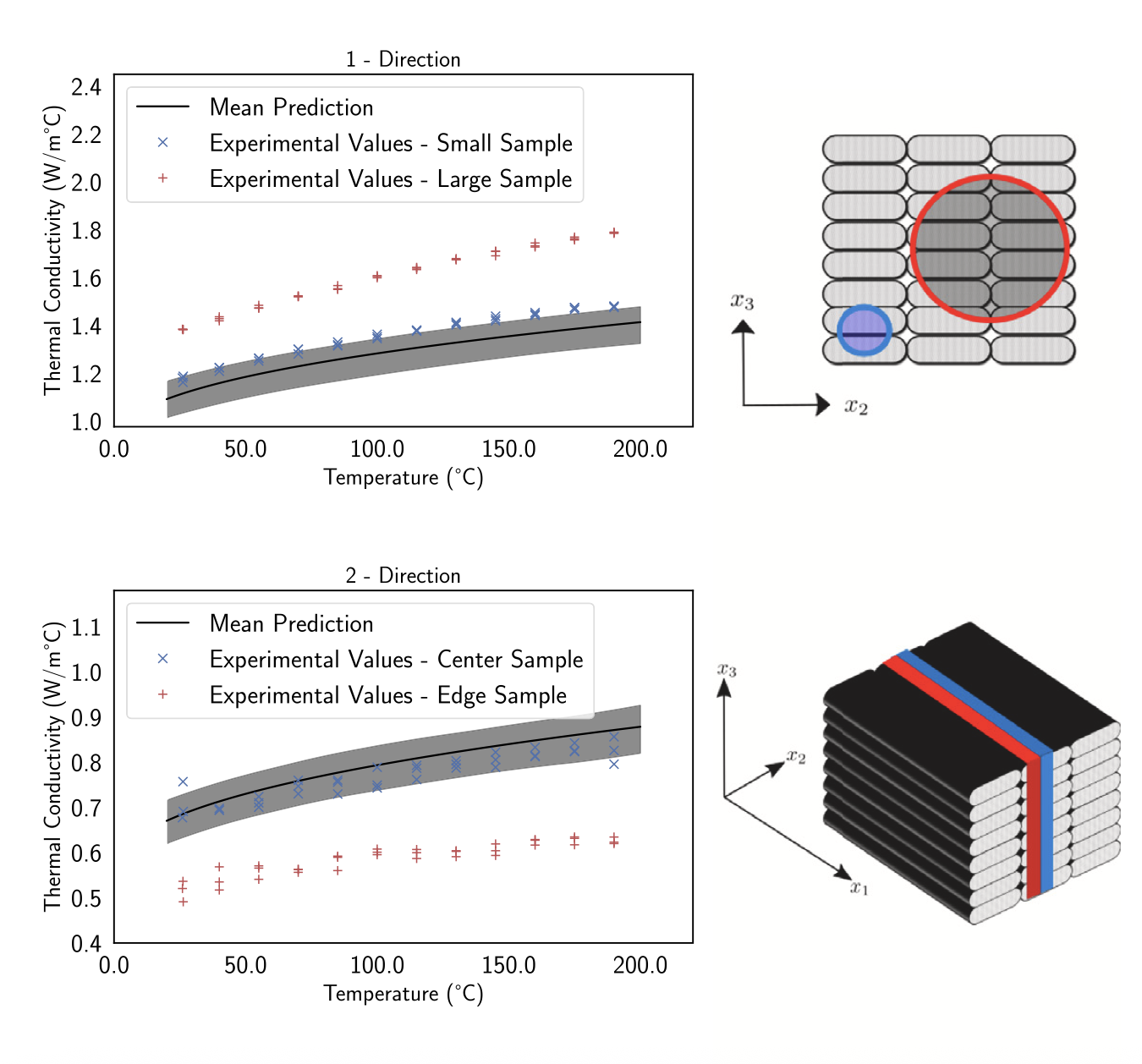
Probabilistic physics-guided transfer learning for material property prediction in extrusion deposition additive manufacturing
Akshay J Thomas, Mateusz Jaszczuk, Eduardo Barocio, Gourab Ghosh, Ilias Bilionis, R Byron Pipes Computer Methods in Applied Mechanics and Engineering, 2024 Paper We introduce the concept of physics-guided transfer learning to predict the thermal conductivity of an additively manufactured short-fiber reinforced polymer (SFRP) using micro-structural characteristics extracted from tensile tests. |
Other Projects |
|
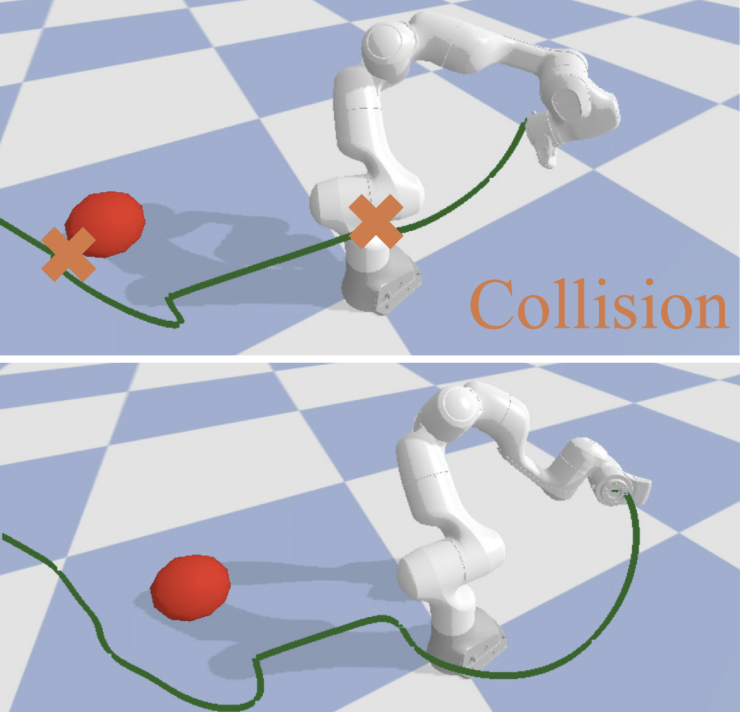
Conditional Diffusion Model for Collision-Free Trajectory Planning in 2D Maze
Code I implemented a conditional diffusion model for 2D point-mass navigation following the planning-as-denoising approach (Janner et al., ICML 2022). A U-Net learns to recover clean trajectories from Gaussian noise conditioned on start and goal positions, trained on D4RL Point Maze demonstrations, producing diverse collision-free paths at inference time. |
|
|
Implementation of Operational Space Control Barrier Functions on Franka Manipulator
Mateusz Jaszczuk, Benjamin Aziel MEAM 5170 Control and Optimization with Applications in Robotics — Final Project Code (coming soon) We implemented control barrier functions (CBFs) into an operational space impedance controller for a 7-DoF Franka Research 3 arm, enforcing joint limit, obstacle avoidance, and self-collision avoidance in real-time. The solver was implemented in Python with PyBullet and OSQP and evaluated on tasks requiring strict safety constraint enforcement. |
|
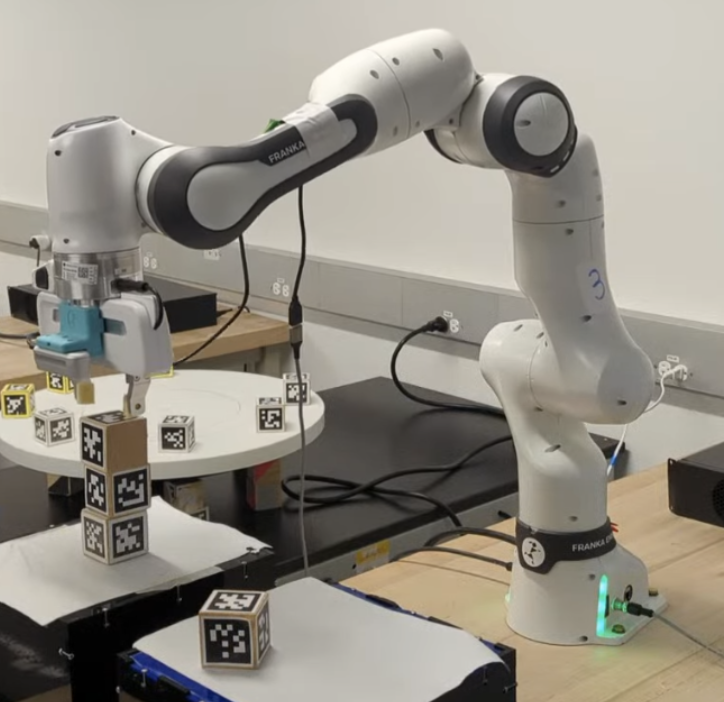
Vision-Based Pick-and-Place with Franka Manipulator
Mateusz Jaszczuk, Benjamin Aziel, Solomon Gonzalez, Andrik Puentes MEAM 5200 Introduction to Robotics — Final Project We developed a full perception-to-execution pipeline for autonomous block stacking on a 7-DoF Franka Research 3, combining AprilTag-based detection, kinematic motion planning, and grasp execution. The system was evaluated on building stable towers under time constraints in both static and dynamic block configurations. |
|
NASA Student Launch Competition
Purdue Space Program — NASA SL Project Website Led a 60-member interdisciplinary team as Project Manager and Lead Structures Engineer for NASA Student Launch, overseeing the full design-to-launch cycle of a high-powered competition rocket. Coordinated deliverables and communications directly with NASA and NAR, managed budget and timeline, and led structural design including FEA, CFD, and component manufacturing. |
|
|
Implementation of Neural Radiance Field
ESE 6500 - Learning in Robotics Implemented Neural Radiance Fields (NeRF) from scratch in PyTorch following the original formulation, including positional encoding, an MLP-based radiance field, and volumetric rendering via differentiable ray marching. Explored the effect of network capacity and sampling strategies on rendering quality across multiple views. |
|
|
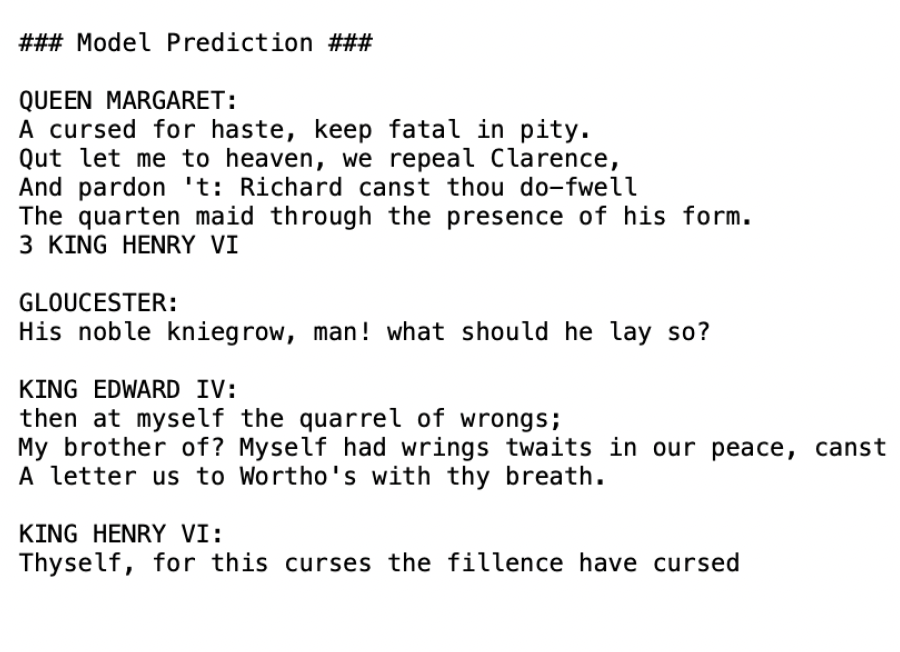
Building GPT from Scratch: Transformer-Based Character-Level Language Modeling
ENM 5310 Data-driven Modeling and Probabilistic Scientific Computing — Final Project Code Implemented a GPT-inspired transformer from scratch in PyTorch following Andrej Karpathy's approach, including multi-head self-attention, positional encoding, and MLP blocks for character-level language generation on different datasets. Conducted ablation studies on regularization techniques including dropout, residual connections and layer normalization. |
|
This website was inspired by and built based on this project page. |